Lecture 13 : Markov Chain Monte Carlo
Assoc. Prof. Yuan-Sen Ting
Astron 5550 : Advanced Astronomical Data Analysis
Logistics
Homework Assignment 4 due this Friday,11:59pm
Group Project 2 - Presentation - April 16 (next Wednesday)
Group Project 2 - Report - April 28 (no deferment)
Logistics
Homework Assignment 4 due this Friday,11:59pm
Group Project 2 - Presentation - April 16 (next Wednesday)
Group Project 2 - Report - April 28 (no deferment)
Plan for Today :
Detailed Balance
Ergodicity
Convergence Test, Autocorrelation and Effective Sample Size
Metropolis-Hasting Algorithms and Gibbs Sampling
Limitations of Basic Sampling Methods
Inverse CDF transform sampling rarely works for complex astronomical posteriors
Rejection sampling efficiency drops dramatically in high-dimensional spaces
Astronomical posteriors feature multiple modes, correlated parameters, and irregular geometries
Bayesian methods characterize full posterior distributions beyond "best-fit" parameters
Understanding Markov Chains
Markov chain: like a traveler exploring Columbus using only current location to decide next stop
Each step depends only on current state, not the history of previously visited locations
States represent points in parameter space of our models
P(X_{t+1} = x | X_0 = x_0, X_1 = x_1, ..., X_t = x_t)
= P(X_{t+1} = x | X_t = x_t)
Understanding Markov Chains
Transition matrix \(T(\mathbf{x}, \mathbf{x'})\) is like a traveler's guidebook suggesting where to go next
Specifies probability of moving from current location \(\mathbf{x}\) to next location \(\mathbf{x'}\)
Understanding Markov Chains
Transition matrix \(T(\mathbf{x}, \mathbf{x'})\) is like a traveler's guidebook suggesting where to go next
Specifies probability of moving from current location \(\mathbf{x}\) to next location \(\mathbf{x'}\)
Guidebook directing traveler between neighborhoods of Columbus
Goal: design a guidebook that makes visitation pattern follow population distribution
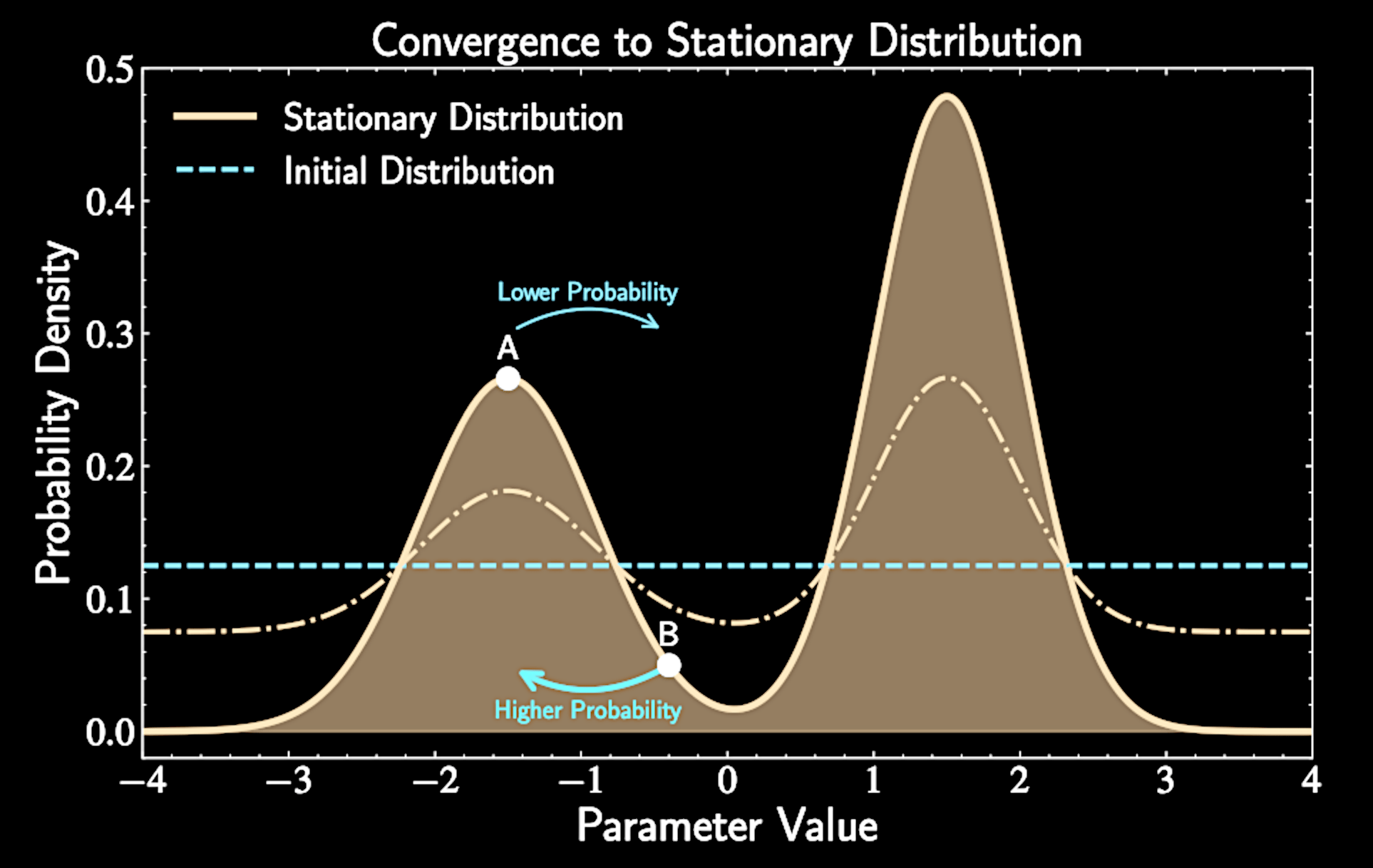
Stationary Distributions
Once traveler's exploration pattern matches population distribution, it stays that way
The "equilibrium" end point of a Markov Chain
Stationary distribution: if traveler follows population distribution, they'll continue to do so
p(\mathbf{x'}) = \int p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) d\mathbf{x} \equiv (Tp)(\mathbf{x})
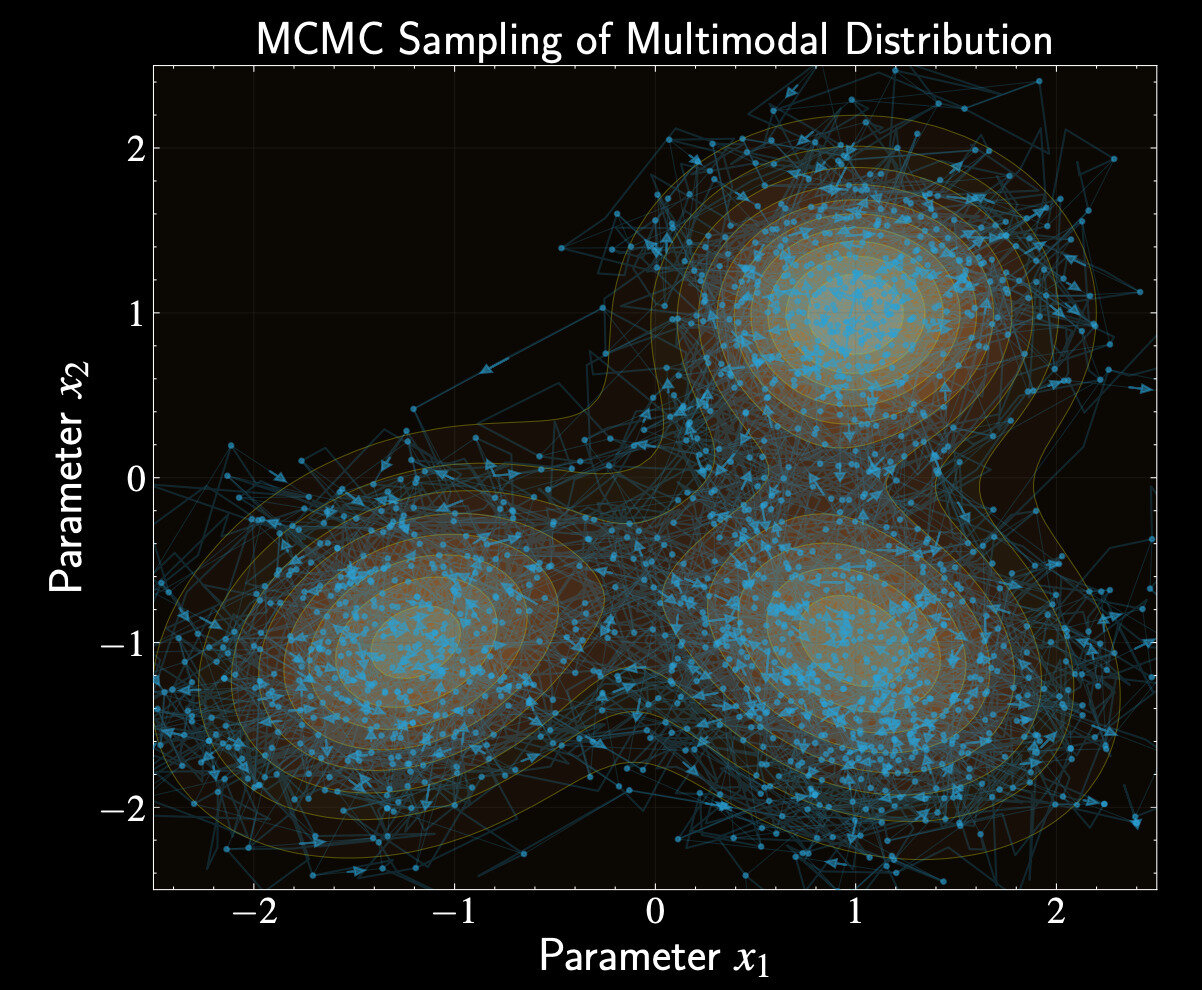
Understanding Markov Chain Monte Carlo
We can design guidebooks (transition matrix) making posterior distribution the stationary distribution
Creates random walk where walker spends time in regions proportional to posterior probability
After enough exploration, each footstep of the traveler becomes a sample from our posterior
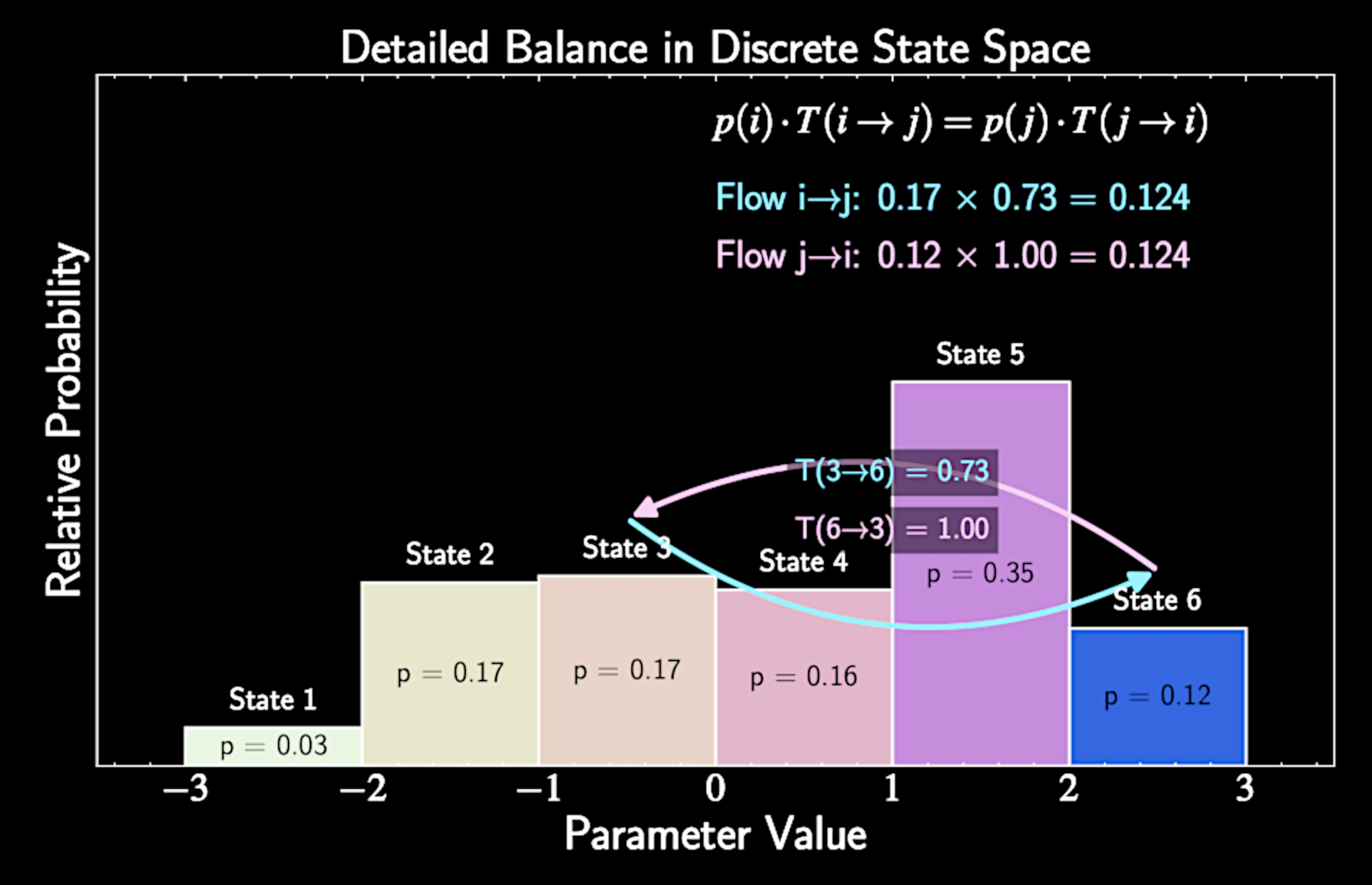
Detailed Balance
Key question: How do we guarantee our target (posterior) distribution \( p (\mathbf{x} ) \) is a stationary distribution?
Detailed balance provides a sufficient condition for stationarity
Mathematically:
p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) = p(\mathbf{x'}) T(\mathbf{x'}, \mathbf{x})
Proving Stationarity from Detailed Balance
p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) = p(\mathbf{x'}) T(\mathbf{x'}, \mathbf{x})
\int p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) d\mathbf{x} = \int p(\mathbf{x'}) T(\mathbf{x'}, \mathbf{x}) d\mathbf{x}
\int p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) d\mathbf{x} = p(\mathbf{x'}) \int T(\mathbf{x'}, \mathbf{x}) d\mathbf{x}
\int p(\mathbf{x}) T(\mathbf{x}, \mathbf{x'}) d\mathbf{x} = p(\mathbf{x'})
Detailed Balance
When flows balance for all neighborhood pairs, population distribution remains stable
Thus, designing a transition matrix that satisfies detailed balance ensures our posterior is a stationary end point.
Constructing a Suitable Transition Matrix
We need to build a transition matrix that satisfies detailed balance
The Metropolis algorithm provides a simple, elegant solution
It decomposes transition into two steps: propose and accept/reject
Transition matrix:
T(\mathbf{x}, \mathbf{x}') = q(\mathbf{x}' | \mathbf{x}) A(\mathbf{x}, \mathbf{x}')
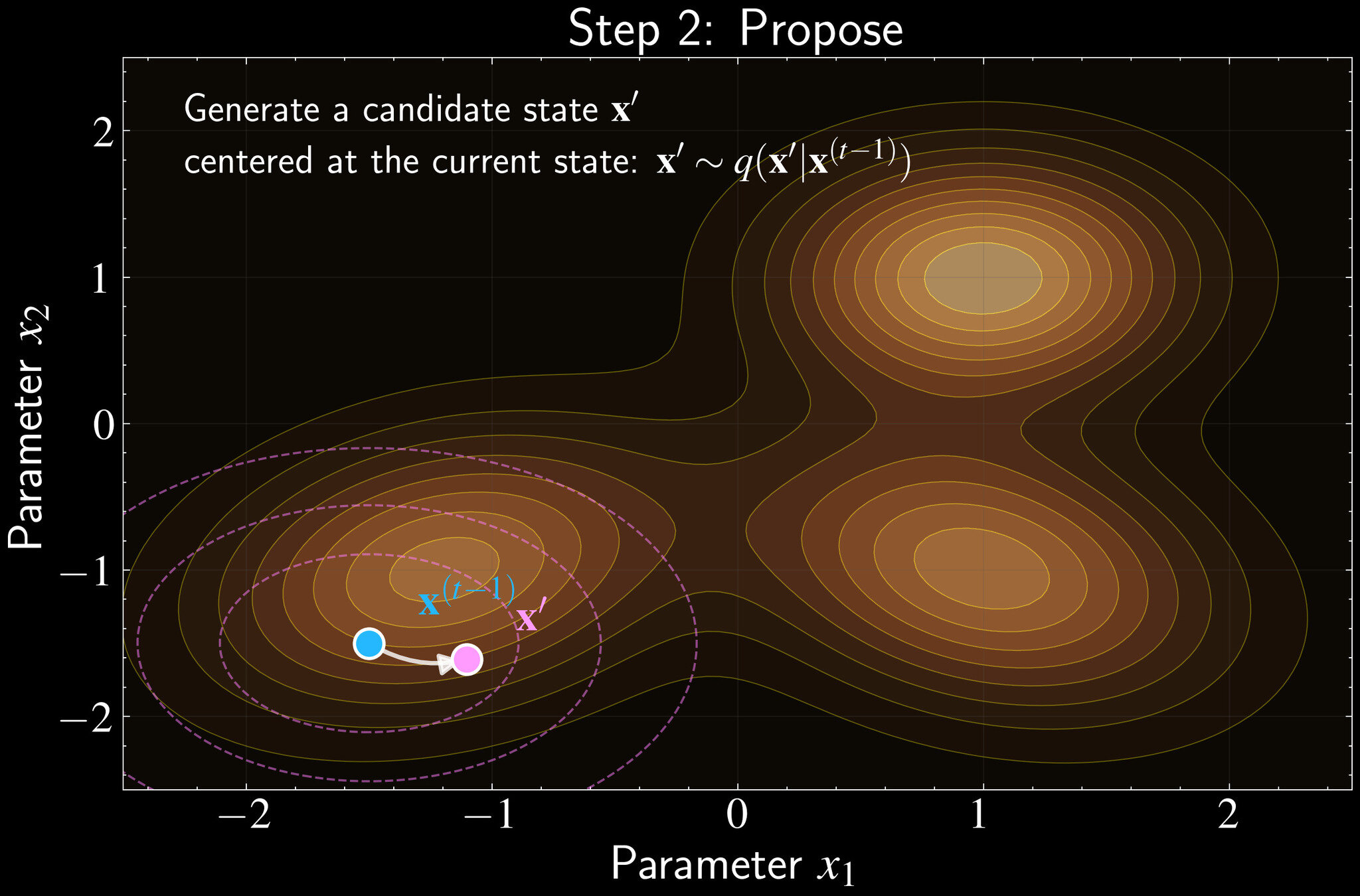
The Proposal Distribution
\(q(\mathbf{x}' | \mathbf{x})\) is the proposal distribution suggesting the next state
Metropolis uses symmetric proposals: \(q(\mathbf{x}' | \mathbf{x}) = q(\mathbf{x} | \mathbf{x}')\)
Common proposal: Gaussian centered at current position
q(\mathbf{x}' | \mathbf{x}) = \mathcal{N}(\mathbf{x}' | \mathbf{x}, \Sigma)
T(\mathbf{x}, \mathbf{x}') = q(\mathbf{x}' | \mathbf{x}) A(\mathbf{x}, \mathbf{x}')
The Acceptance Probability
Metropolis algorithm defines:
Compare posterior probability at current and proposed states
If proposed state has higher probability, always accept
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}')}{p(\mathbf{x})}\right)
T(\mathbf{x}, \mathbf{x}') = q(\mathbf{x}' | \mathbf{x}) A(\mathbf{x}, \mathbf{x}')
If lower probability, accept with probability equal to the ratio
Verifying Detailed Balance
Need to show:
Substitute transition matrix:
p(\mathbf{x}) T(\mathbf{x}, \mathbf{x}') = p(\mathbf{x}') T(\mathbf{x}', \mathbf{x})
p(\mathbf{x}) q(\mathbf{x}' | \mathbf{x}) A(\mathbf{x}, \mathbf{x}') = p(\mathbf{x}') q(\mathbf{x} | \mathbf{x}') A(\mathbf{x}', \mathbf{x})
p(\mathbf{x}) A(\mathbf{x}, \mathbf{x}') = p(\mathbf{x}') A(\mathbf{x}', \mathbf{x})
Verifying Detailed Balance (Case 1)
If \(p(\mathbf{x}') \geq p(\mathbf{x})\):
Substituting:
A(\mathbf{x}, \mathbf{x}') = 1
p(\mathbf{x}) A(\mathbf{x}, \mathbf{x}') = p(\mathbf{x}') A(\mathbf{x}', \mathbf{x})
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}')}{p(\mathbf{x})}\right)
A(\mathbf{x}', \mathbf{x}) = \frac{p(\mathbf{x})}{p(\mathbf{x}')}
p(\mathbf{x}) = p(\mathbf{x})
Verifying Detailed Balance (Case 2)
If \(p(\mathbf{x}') < p(\mathbf{x})\):
Substituting:
A(\mathbf{x}, \mathbf{x}') = \frac{p(\mathbf{x}')}{p(\mathbf{x})}
p(\mathbf{x}) A(\mathbf{x}, \mathbf{x}') = p(\mathbf{x}') A(\mathbf{x}', \mathbf{x})
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}')}{p(\mathbf{x})}\right)
A(\mathbf{x}', \mathbf{x}) = 1
p(\mathbf{x}') = p(\mathbf{x}')
Key Advantage for Astronomy
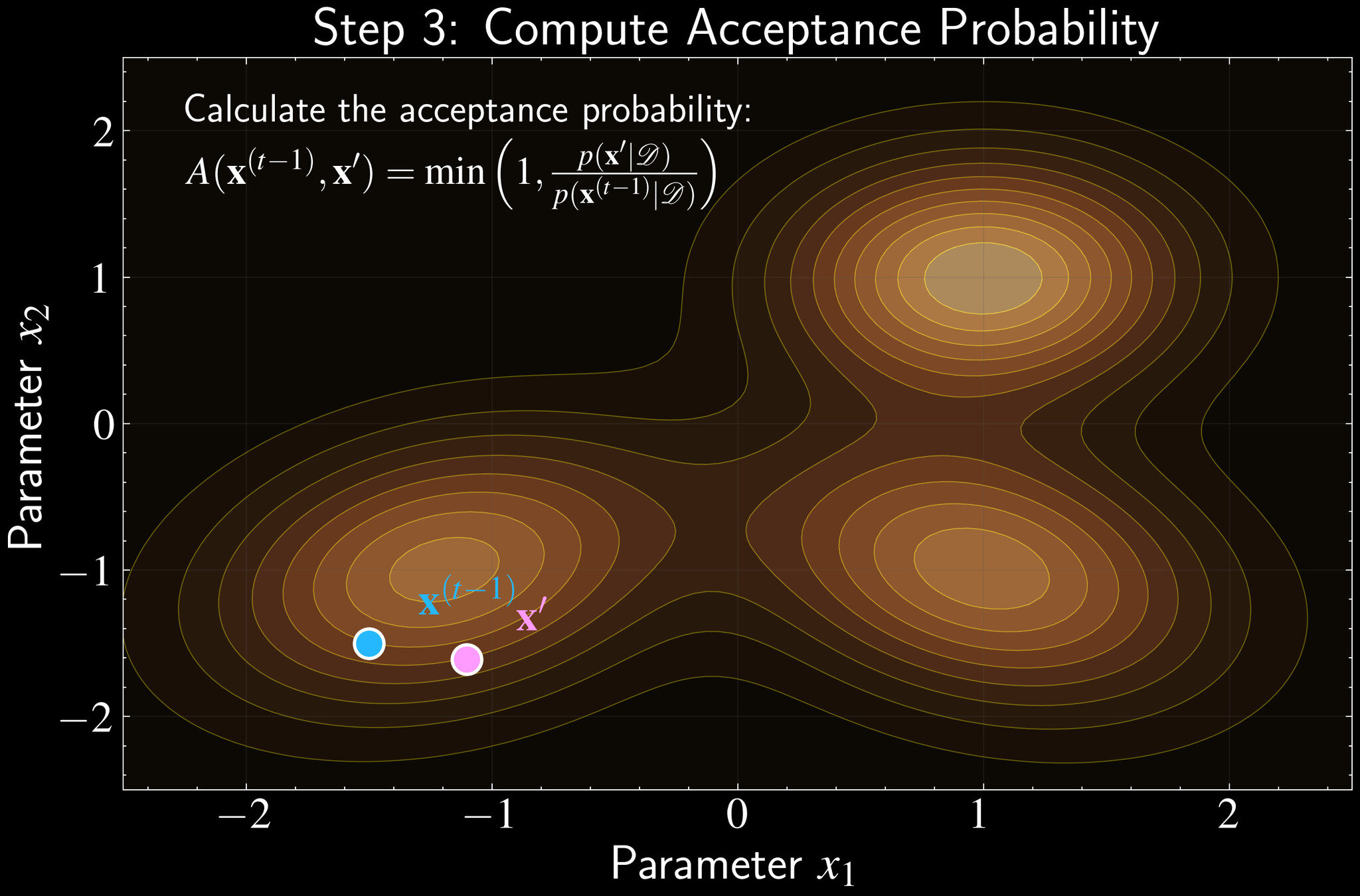
Metropolis only requires ratio of posterior probabilities:
The evidence term \(p(\mathcal{D})\) cancels out completely
Transforms an intractable sampling problem into simple likelihood and prior evaluations
\frac{p(\mathbf{x}'|\mathcal{D})}{p(\mathbf{x}|\mathcal{D})}
= \frac{p(\mathcal{D}|\mathbf{x}')p(\mathbf{x}')}{p(\mathcal{D}|\mathbf{x})p(\mathbf{x})}
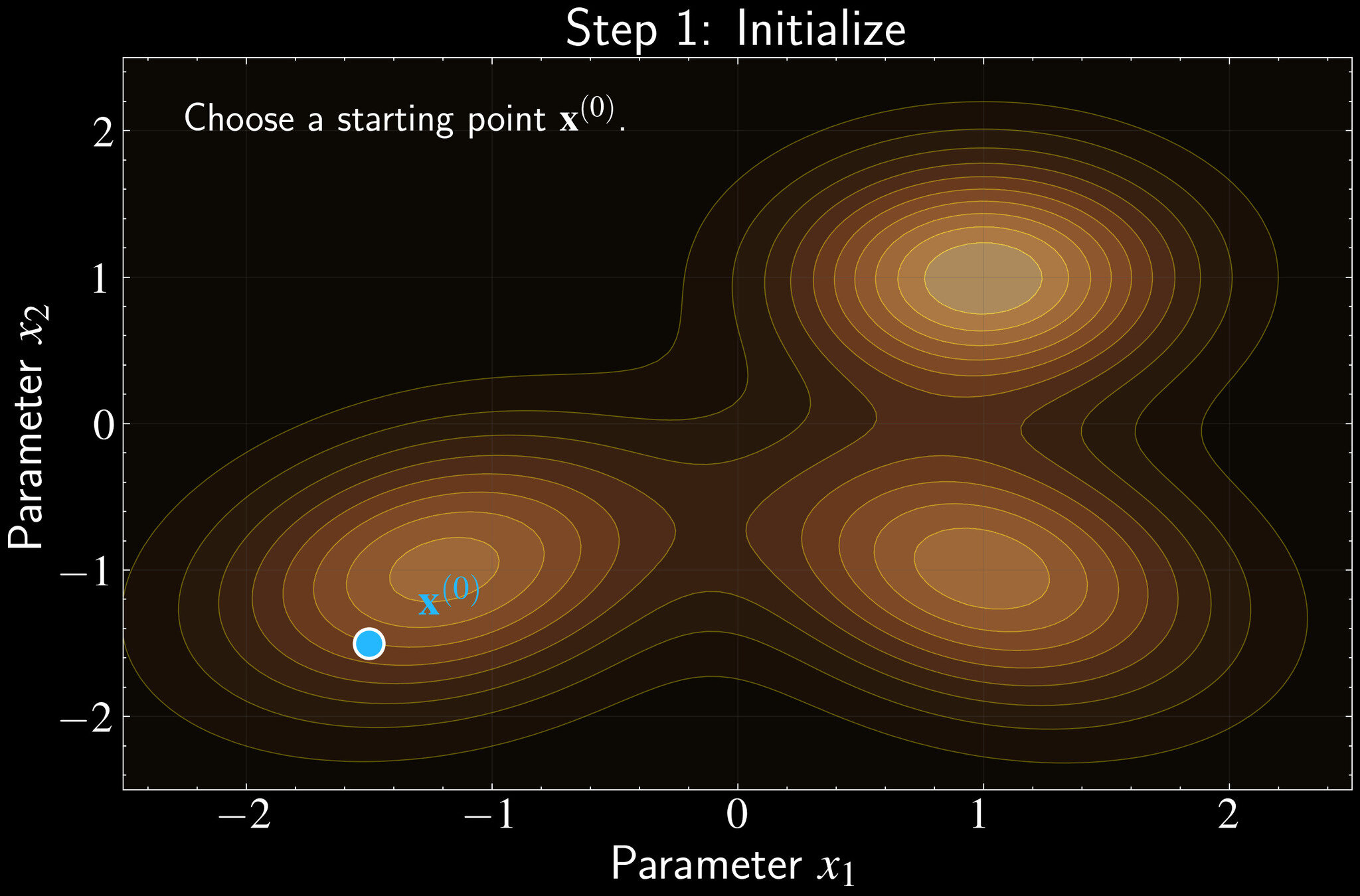
Implementation of Metropolis Algorithm
Initialize: Choose starting point \(\mathbf{x}^{(0)}\) in parameter space
Implementation of Metropolis Algorithm
For each iteration \(t = 1, 2, \ldots, T\):
Propose: Generate candidate \(\mathbf{x}' \sim q(\mathbf{x}'|\mathbf{x}^{(t-1)})\) using symmetric proposal
Initialize: Choose starting point \(\mathbf{x}^{(0)}\) in parameter space
Implementation of Metropolis Algorithm
For each iteration \(t = 1, 2, \ldots, T\):
Propose: Generate candidate \(\mathbf{x}' \sim q(\mathbf{x}'|\mathbf{x}^{(t-1)})\) using symmetric proposal
Compute acceptance probability:
Initialize: Choose starting point \(\mathbf{x}^{(0)}\) in parameter space
A(\mathbf{x}^{(t-1)}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}'|\mathcal{D})}{p(\mathbf{x}^{(t-1)}|\mathcal{D})}\right)
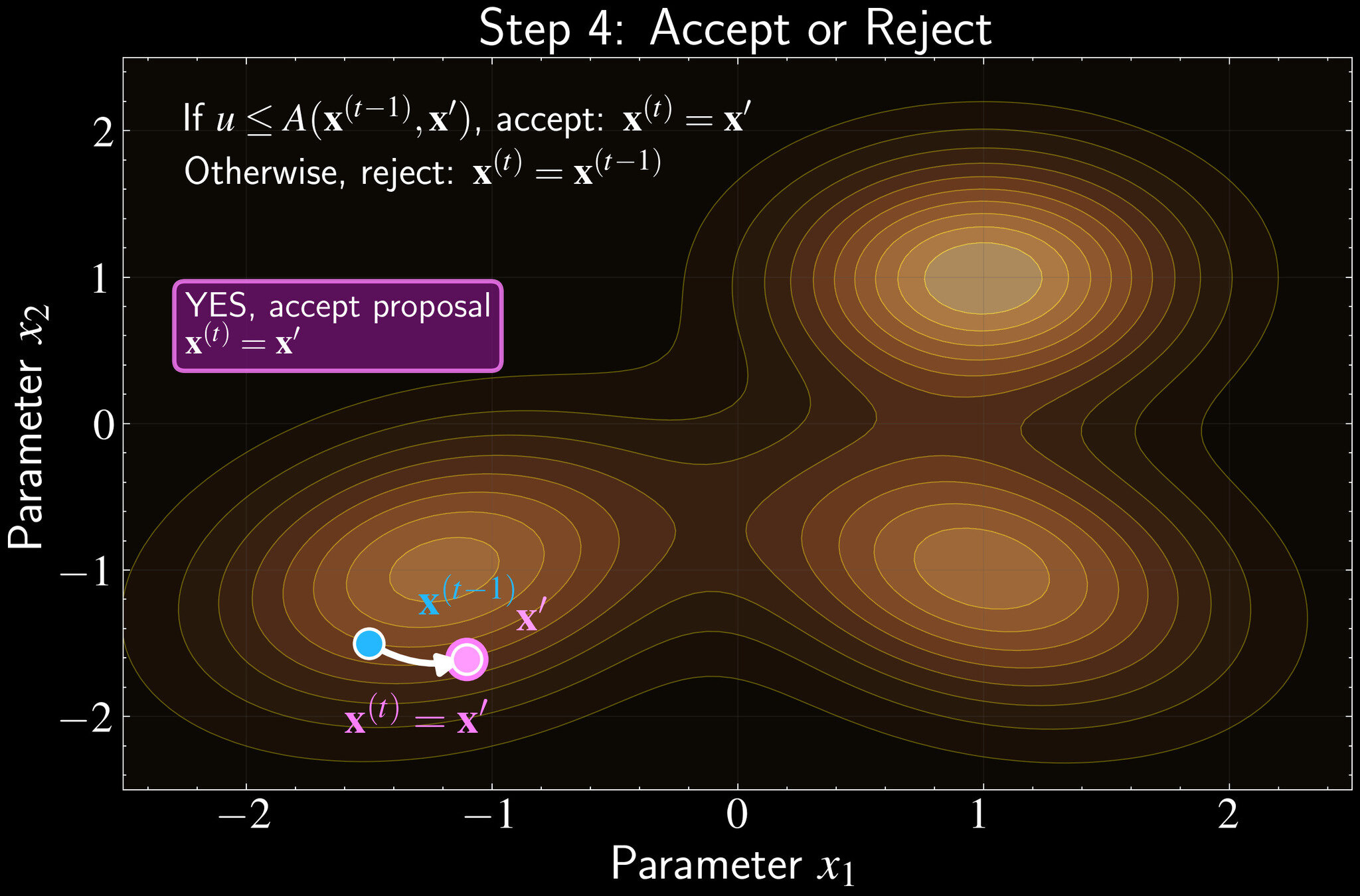
Accept/Reject:
If \(u \leq A\), accept: \(\mathbf{x}^{(t)} = \mathbf{x}'\)
Otherwise, stay put: \(\mathbf{x}^{(t)} = \mathbf{x}^{(t-1)}\)
Repeat
Draw uniform random number \(u \sim \mathcal{U}(0,1)\)
A(\mathbf{x}^{(t-1)}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}'|\mathcal{D})}{p(\mathbf{x}^{(t-1)}|\mathcal{D})}\right)
Convergence: no matter where we start, we eventually sample from target distribution
Uniqueness: there's only one stationary distribution our chain can converge to
Two Critical Properties: Convergence and Uniqueness
Convergence
Mathematically:
Starting distribution doesn't matter after sufficient iterations
Like tourists from anywhere in Ohio all becoming proper Columbus residents given enough time
\lim_{n\to\infty} (T^n \tilde{p})(\mathbf{x}) = p(\mathbf{x}), \quad \text{for all } \tilde{p}(\mathbf{x})
Uniqueness:
Uniqueness means if \((T p_1)(\mathbf{x}) = p_1(\mathbf{x})\) and \((T p_2)(\mathbf{x}) = p_2(\mathbf{x})\), then \(p_1(\mathbf{x}) = p_2(\mathbf{x})\)
Our travel guide must lead to only sampling from one unique distribution in the end point
Making sure our guide doesn't turn us into Cincinnati residents!
Counterexample 1: Uniqueness Failure
Neither convergence nor uniqueness is guaranteed for all Markov chains
Consider the "stay where you are" travel guide: \(T = \mathbf{Id}\)
All starting distributions are stationary: no one ever moves
Counterexample 2: Convergence Failure
Imagine Columbus with only two states: Short North and German Village
Transition matrix: \(T = \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix}\)
Travel guide: "Always move to the other neighborhood"
Has stationary distribution \(p(\mathbf{x}) = [0.5, 0.5]\) but never converges to it if we do not start with this distribution
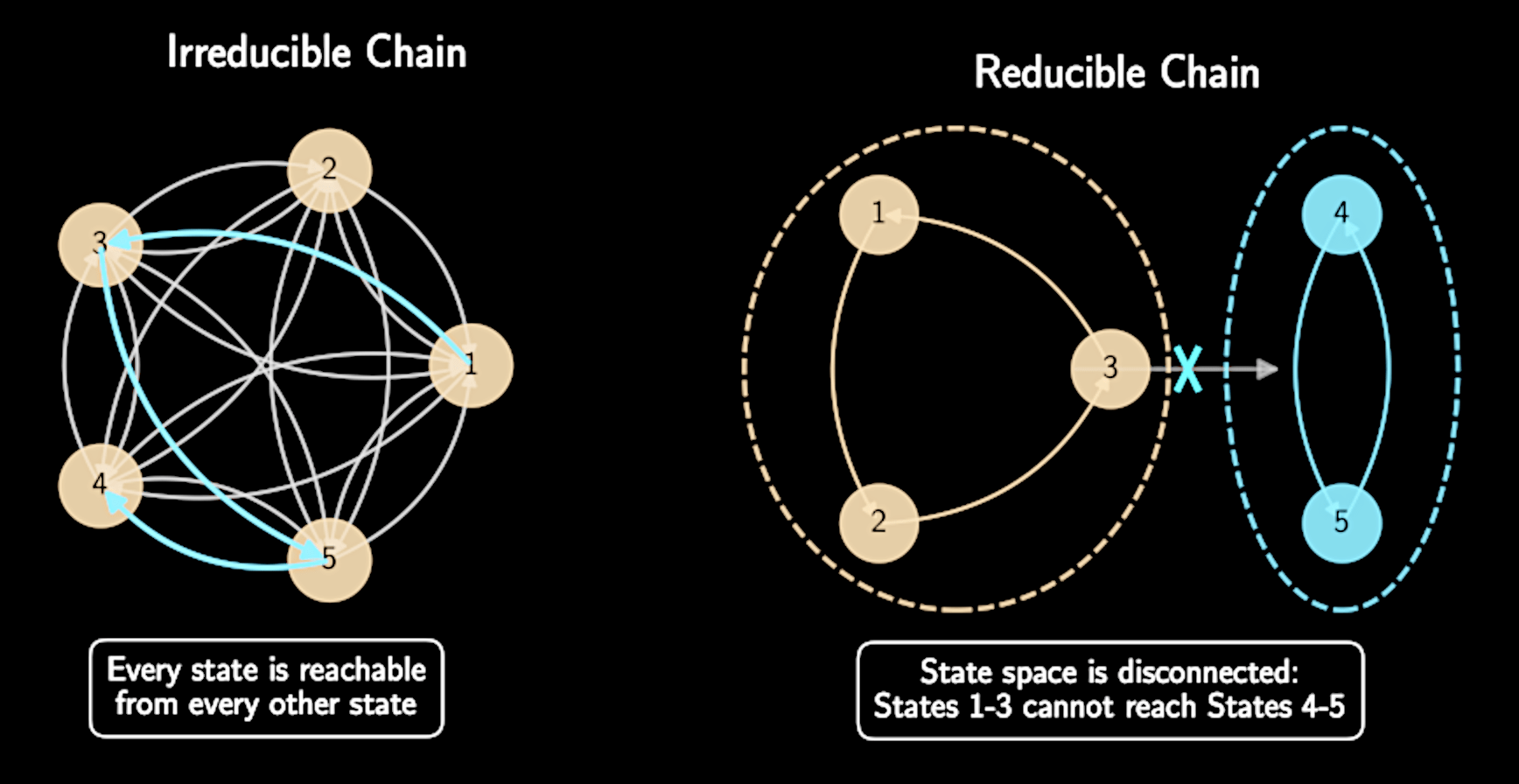
Three Conditions for Ergodicity
Irreducibility: Chain can go from any state to any other state in finite steps
Aperiodicity: Chain doesn't visit states in predictable cyclic patterns
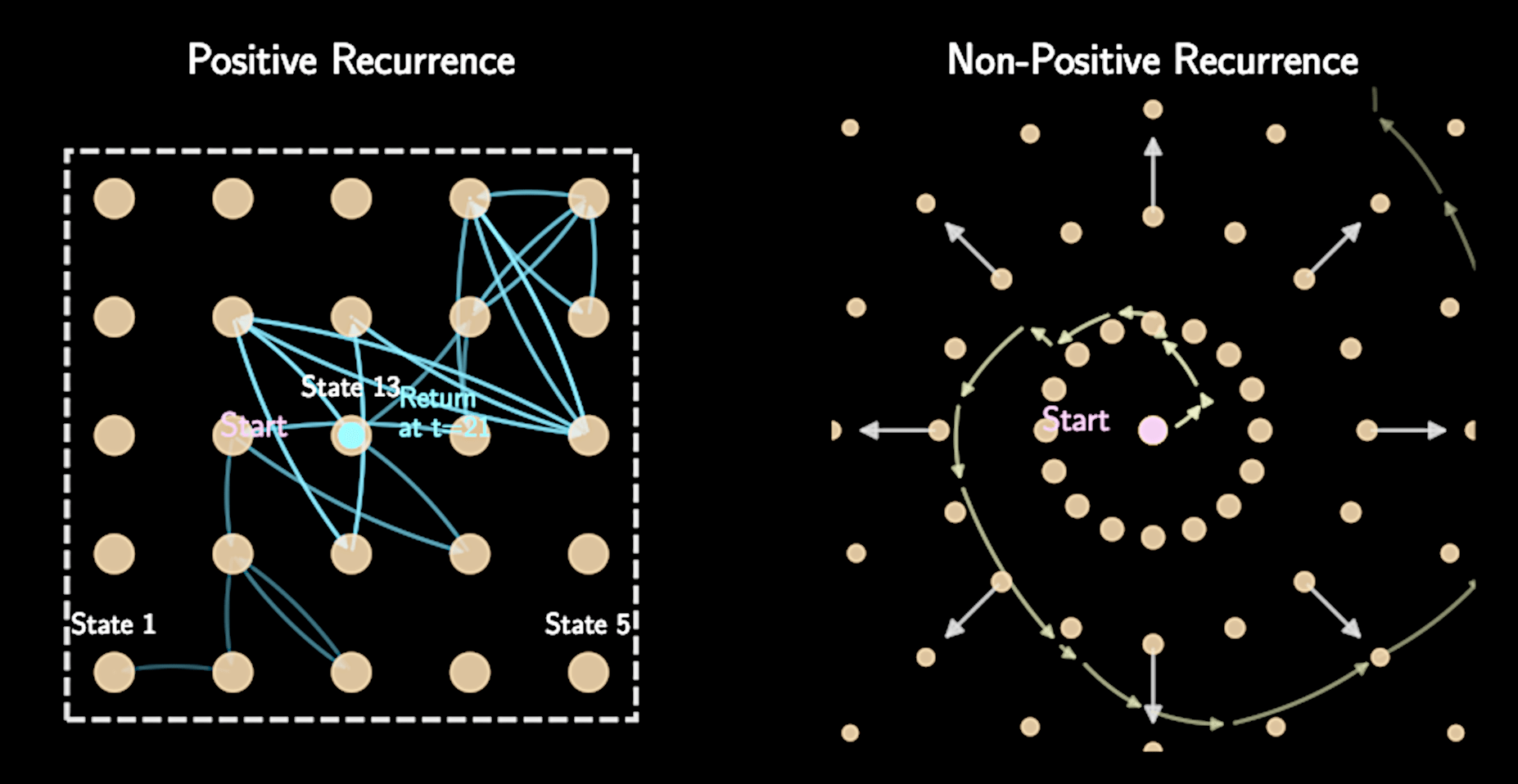
Positive recurrence: Expected time to return to any state is finite
Ergodicity guarantees both convergence and uniqueness
Irreducibility
In Columbus analogy: Ability to travel between any two neighborhoods given enough time
No isolated regions of parameter space that can't be reached
Irreducibility
In Columbus analogy: Ability to travel between any two neighborhoods given enough time
No isolated regions of parameter space that can't be reached
Can be violated if posterior has completely separated modes
Like having two separate rooms with a perfect vacuum between them
Aperiodicity and Positive Recurrence
Aperiodicity prevents oscillating behavior (recall the Short North/German Village example)
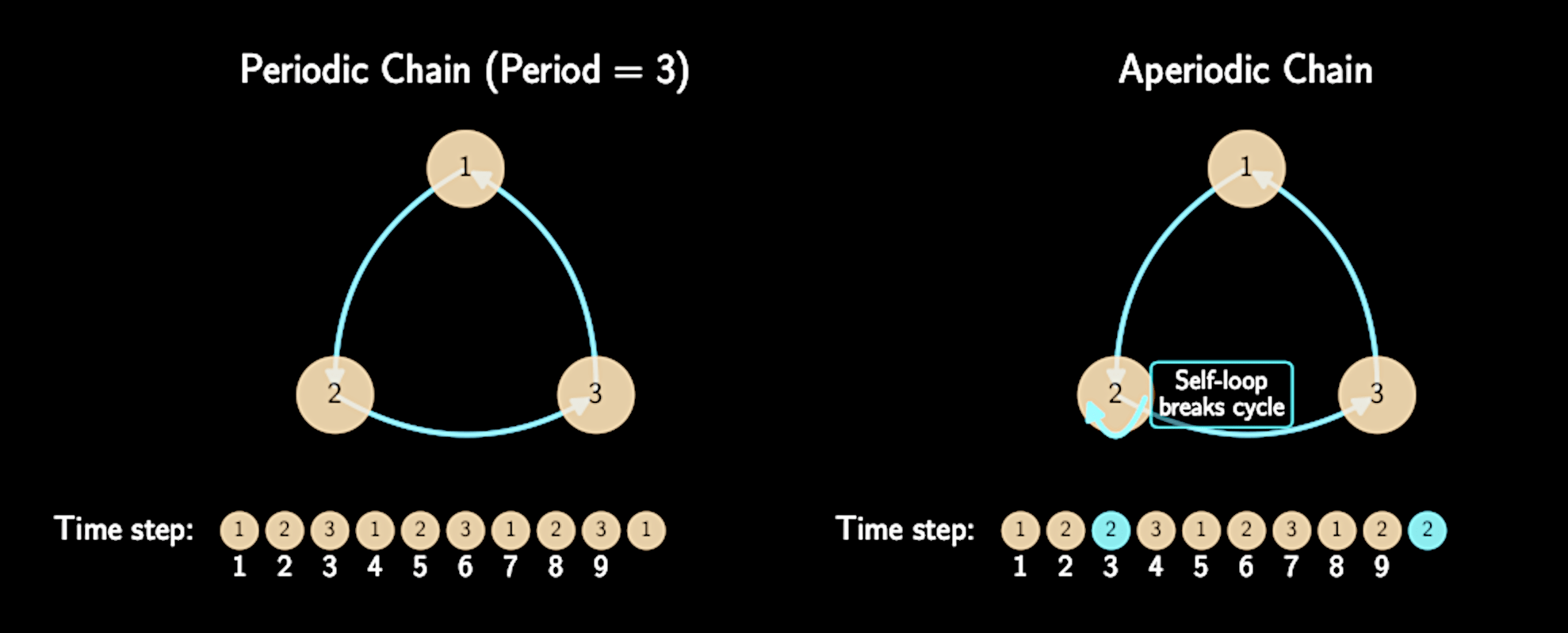
Aperiodicity and Positive Recurrence
Aperiodicity prevents oscillating behavior (recall the Short North/German Village example)
Usually satisfied by default in standard MCMC implementations
Positive recurrence prevents "wandering off to infinity"
Ensured by proper priors that bound parameter space to finite regions
Consequences of Ergodicity
When a chain is ergodic, two crucial results are guaranteed:
A unique stationary distribution exists
The chain will converge to this distribution from any starting point
Ergodicity
Ergodicity provides the theoretical foundation for why MCMC works
An ergodic chain can explore all possible states and reach equilibrium
Like gas particles exploring and equilibrating throughout a closed room
For almost all target posterior distribution, the Metropolis algorithm is naturally ergodic
Logistics
Group Project 2 - Presentation - April 16 (this Wednesday!)
Group Project 2 - Report - April 28 (no deferment)
Plan for Today :
Detailed Balance
Ergodicity
Convergence Test, Autocorrelation and Effective Sample Size
Metropolis-Hasting Algorithms and Gibbs Sampling
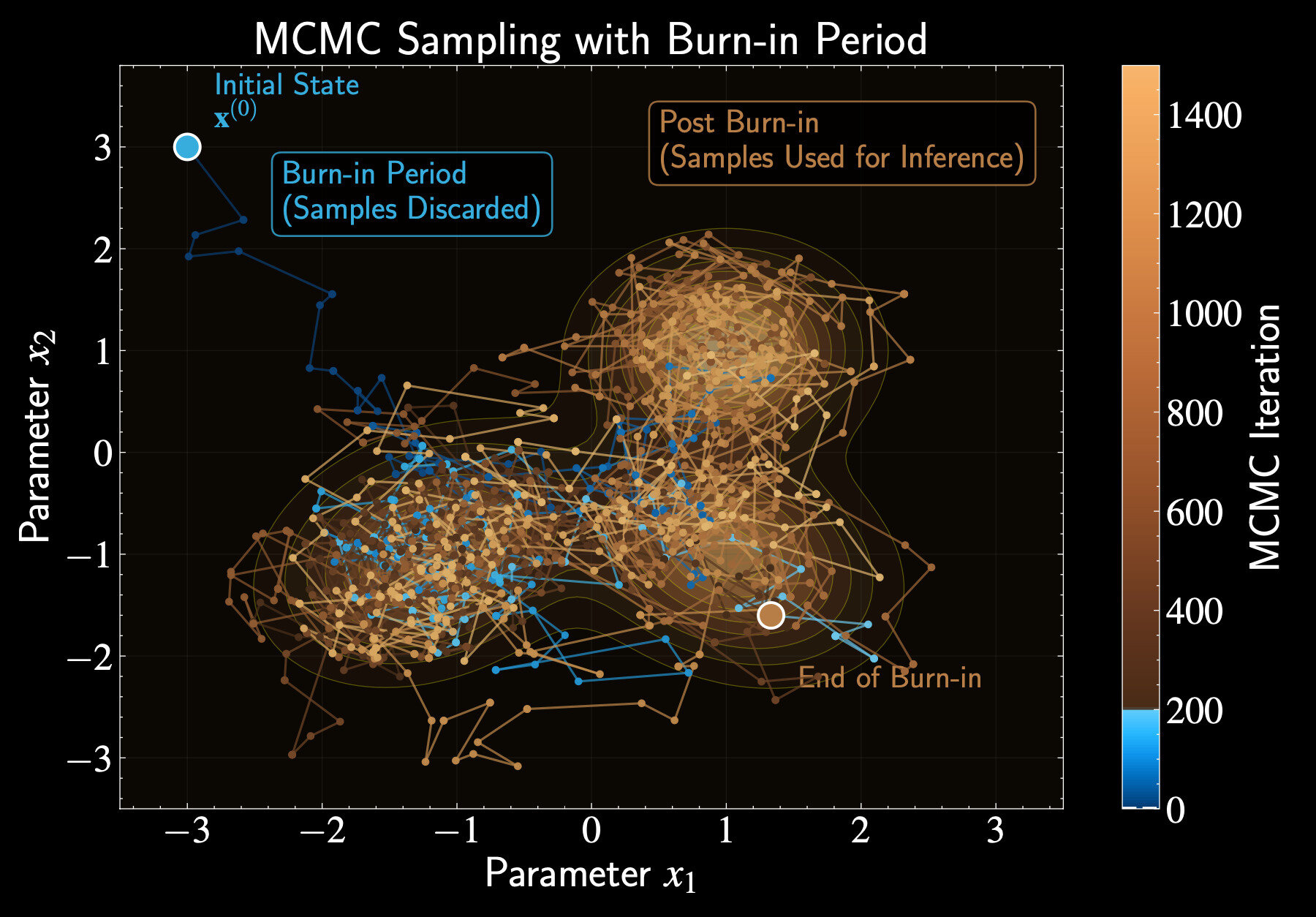
Burn-in: Warming Up the Chain
Burn-in is the warm-up period for our Markov chain
Like Columbus starting from outskirts before finding city center
Discard these initial samples when summarizing posterior
Initial samples reflect starting position, not target distribution
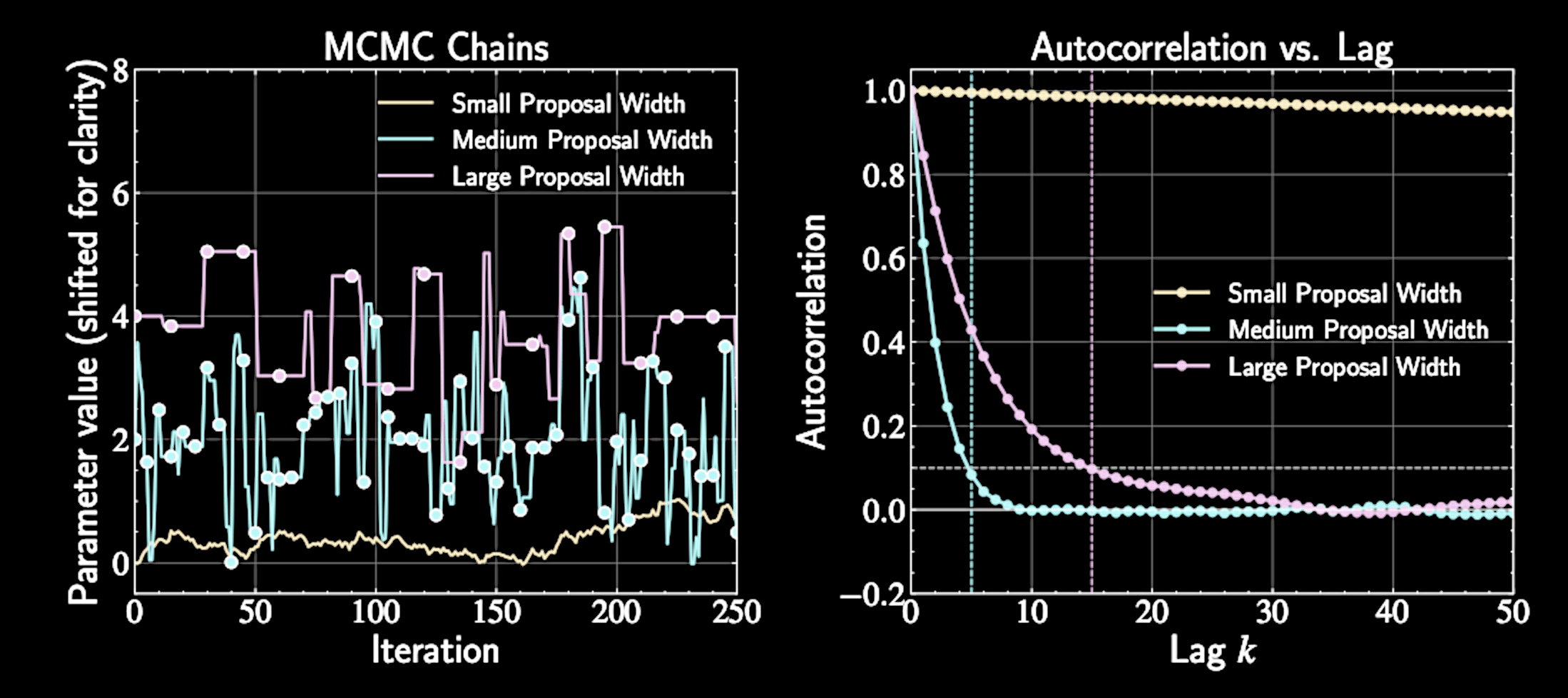
Impact of Proposal Scale in Metropolis Algorithm
Proposal choice critically affects sampling efficiency
Symmetric proposal common choice: multivariate Gaussian
q(\mathbf{x}' | \mathbf{x}) = \mathcal{N}(\mathbf{x}' | \mathbf{x}, \Sigma)
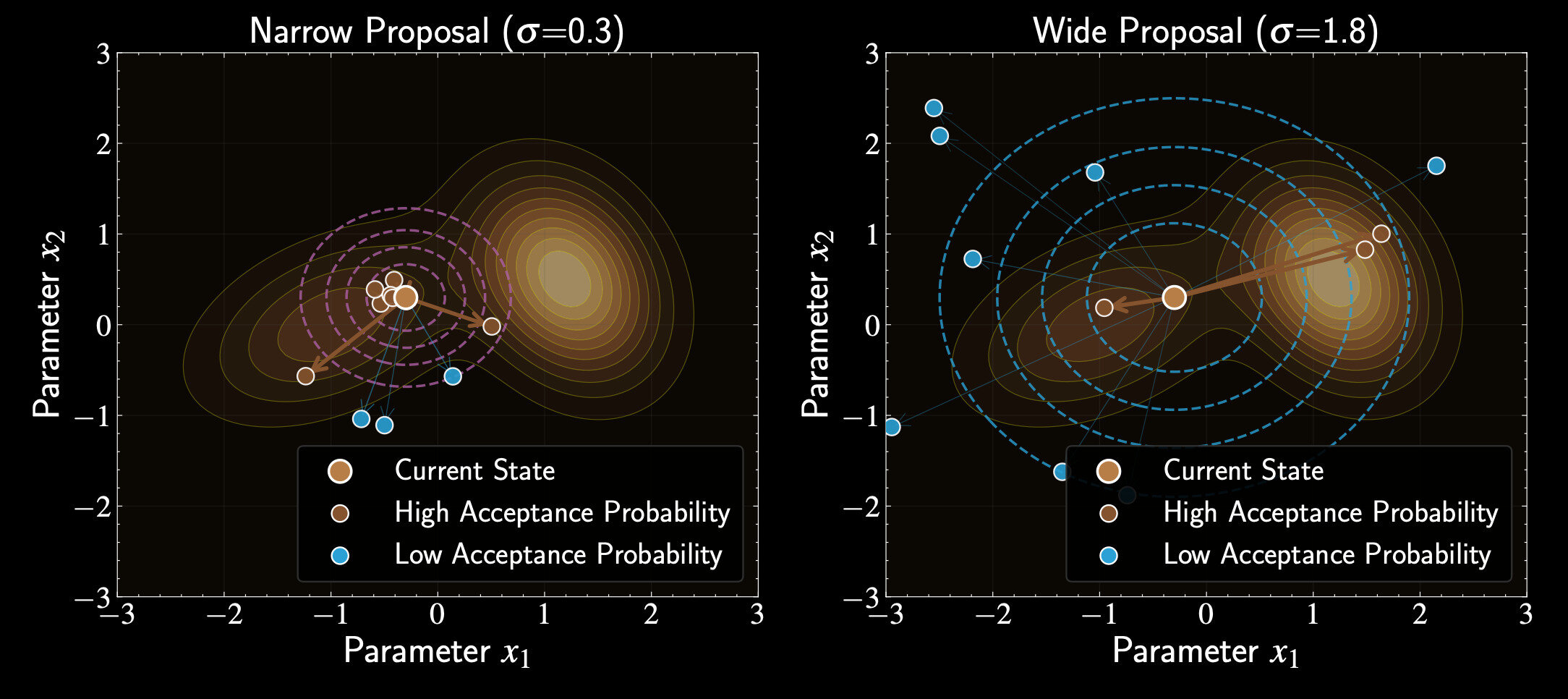
Acceptace Rate
Optimal scale: 20-40% acceptance rate for efficient exploration
Balance between moving enough and having reasonable acceptance
Too narrow proposals: high acceptance rate but slow exploration
Too wide proposals: low acceptance rate with frequent rejections
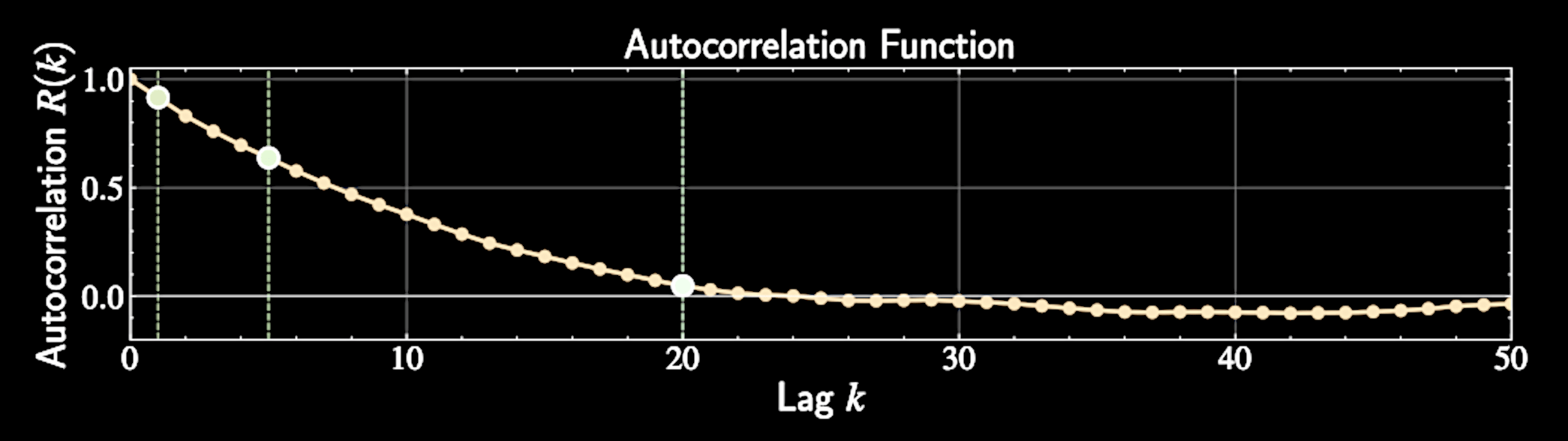
Autocorrelation: Definition and Meaning
Formal definition:
Autocorrelation at lag \( k \) measures dependency between points separated by \( k \) steps
Measures how much knowing \( X_t \) helps predict \( X_{t+k} \)
R(k) = \frac{E[(X_t - \mu)(X_{t+k} - \mu)]}{\sigma^2}
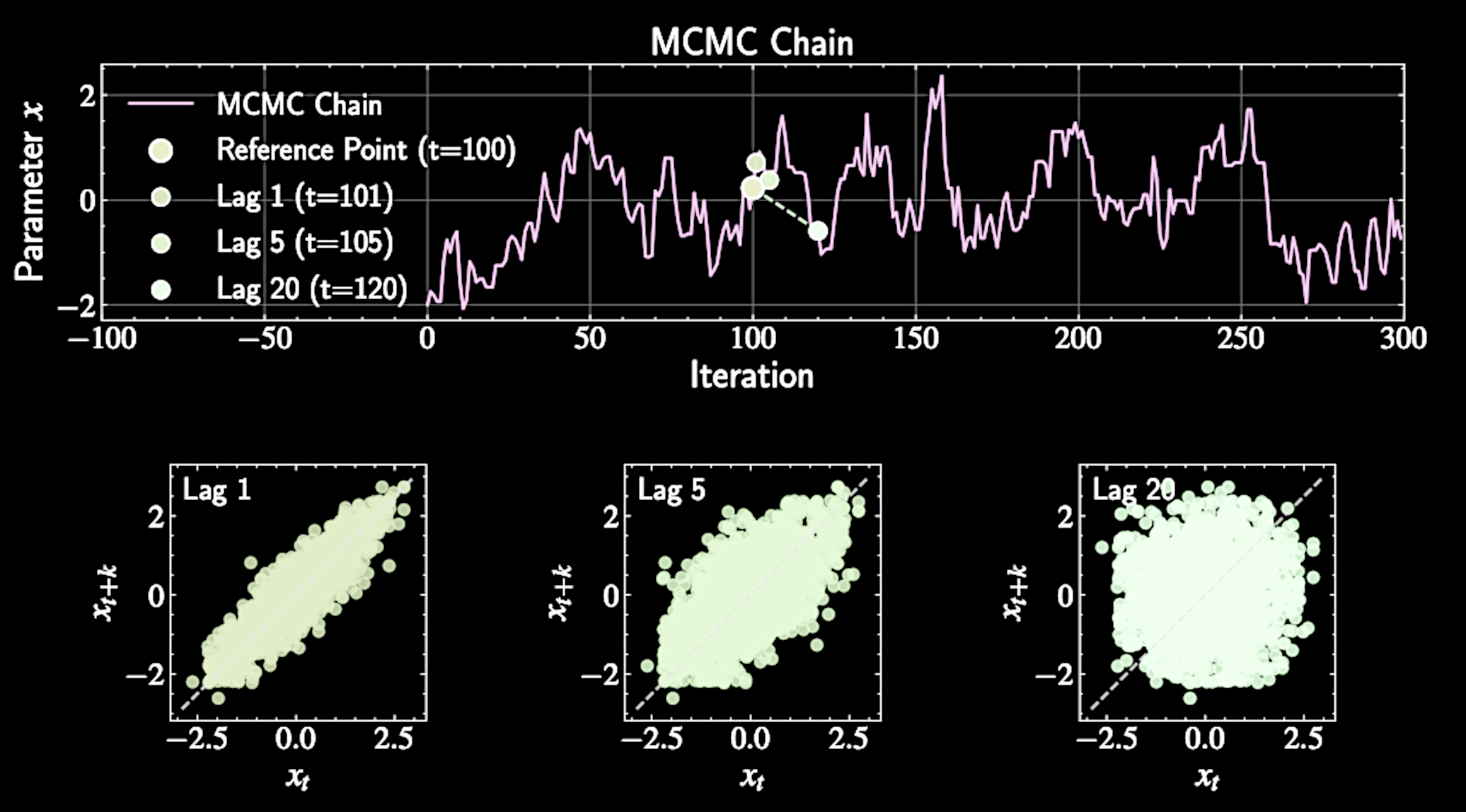
The Ergodic Perspective
Different points in same chain can be viewed as separate draws from target distribution
Well-designed MCMC chains are ergodic: irreducible, aperiodic, positive recurrent
Time averages become equivalent to ensemble averages
\hat{R}(k) = \frac{\sum_{t=1}^{N-k} (X_t - \bar{X})(X_{t+k} - \bar{X})}{\sum_{t=1}^{N} (X_t - \bar{X})^2}
Effective Sample Size (ESS)
ESS represents equivalent number of independent samples
MCMC chain of length \( N \) contains less information than \( N \) independent samples
ESS defined as:
\text{ESS} = \frac{N}{1 + 2\sum_{k=1}^{\infty}R(k)}
For independent samples: all \( R(k) = 0 \) for all \( k \), giving \( \text{ESS} = N \)
Derivation of ESS
Variance of the sample mean:
For our MCMC sample mean:
Must account for correlation between samples
\text{Var}(\bar{X}) = \frac{1}{N^2}\text{Var}\left(\sum_{i=1}^{N}X_i\right)
\bar{X} = \frac{1}{N}\sum_{i=1}^{N}X_i
\text{Var}\left(\sum_{i=1}^{N}X_i\right) = \sum_{i=1}^{N}\sum_{j = 1}^{N} \text{Cov}(X_i, X_j)
Derivation of ESS
Substituting:
In stationary chain, covariance depends only on lag:
For each lag \( k \), exactly \( (N-k) \) pairs have that lag
\text{Var}(\bar{X}) = \frac{1}{N^2}\sum_{i=1}^{N}\sum_{j=1}^{N}\sigma^2 R(|i-j|)
\text{Cov}(X_i, X_j) = \sigma^2 R(|i-j|)
\text{Var}\left(\sum_{i=1}^{N}X_i\right) = \sum_{i=1}^{N}\sum_{j = 1}^{N} \text{Cov}(X_i, X_j)
\text{Var}(\bar{X}) = \frac{\sigma^2}{N}\left[1 + 2\sum_{k=1}^{N-1}\left(1-\frac{k}{N}\right)R(k)\right]
Derivation of ESS
For independent samples, variance would be
For large \( N \), approximate as:
Equating
\frac{\sigma^2}{\text{ESS}}
\text{Var}(\bar{X}) \approx \frac{\sigma^2}{N}\left(1 + 2\sum_{k=1}^{\infty}R(k)\right)
\text{ESS} = \frac{N}{1 + 2\sum_{k=1}^{\infty}R(k)}
Denominator represents average number of correlated samples needed for one independent sample
Thinning in MCMC
Benefits: reduces storage needs, makes data more manageable, improves certain estimators
Thinning: keeping only every \( k \)-th sample to reduce correlation
Cost: discards some information since correlation between samples isn't perfect
Balance statistical precision against computational constraints
The Convergence Diagnostic
Critical challenge: determining when burn-in period is over
Including burn-in samples biases posterior estimates and leads to incorrect inferences
Target distribution is unknown - that's why we're using MCMC
Must rely on diagnostics that examine the chain's behavior
Effective Sample Size as Convergence Diagnostic
Well-converged chain: ESS grows approximately linearly with sample size after burn-in
Monitor how ESS changes as more samples are included
Low ESS relative to chain length suggests poor mixing and potential convergence issues
High ESS doesn't guarantee convergence - chain might mix well in restricted parameter space
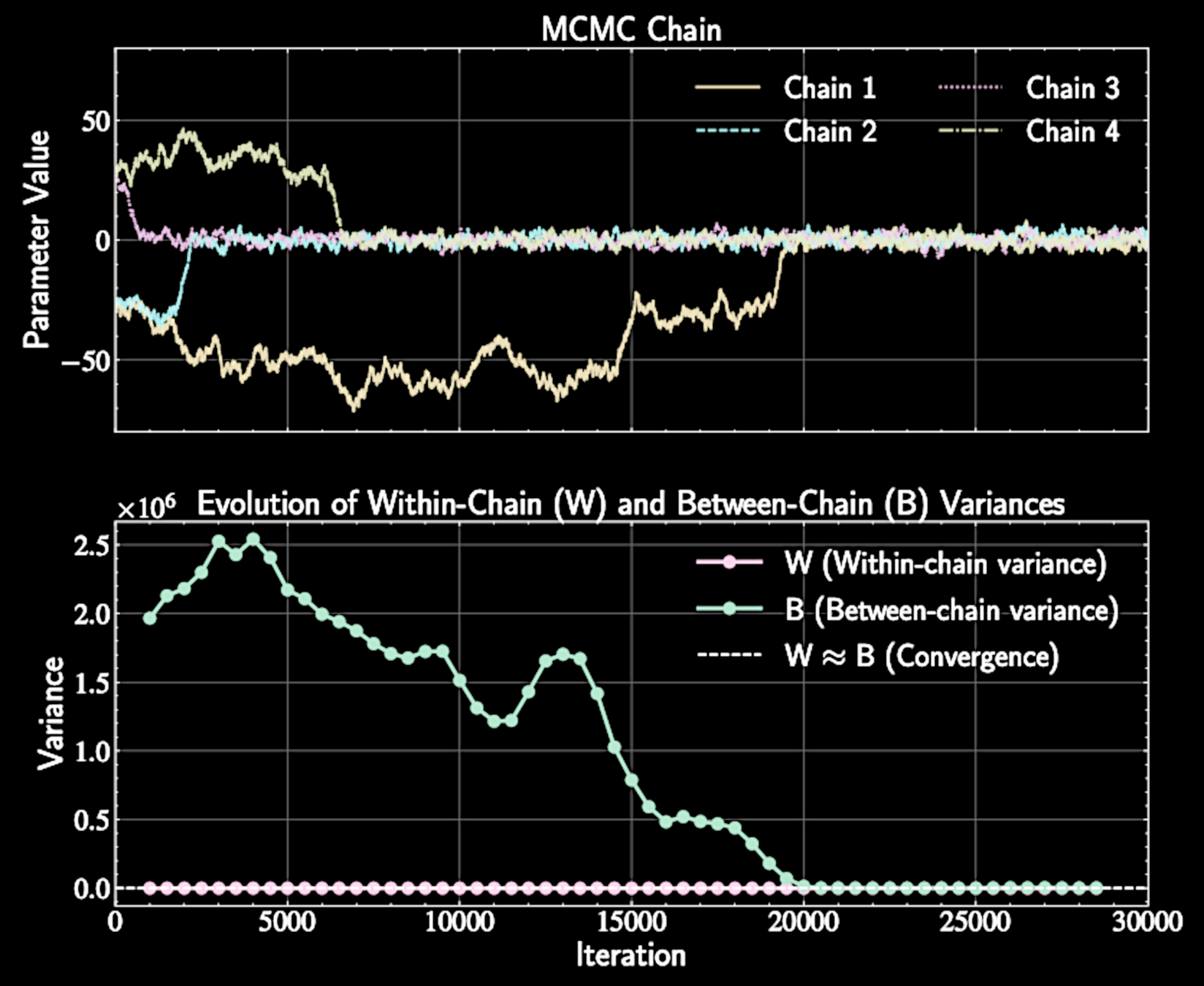
Gelman-Rubin Method: Overview
Compare within-chain variance to between-chain variance, If chains have converged, these variances should be similar
Columbus analogy: multiple explorers should report similar neighborhood statistics
Within-Chain Variance Calculation
Within-chain variance \(W\) is the average:
For each chain \(j\), compute variance for each chain:
Represents average variance observed within individual chains
s_j^2 = \frac{1}{N}\sum_{i=1}^{N}(x_{ij} - \bar{x}_j)^2
W = \frac{1}{M}\sum_{j=1}^{M}s_j^2
Between-Chain Variance Calculation
Scale by \(n\) to make comparable to within-chain variance
Calculate variance of chain means:
When chains have converged, \(B \approx W\)
\text{Var}(\bar{x}_j) = \frac{1}{M}\sum_{j=1}^{M}(\bar{x}_j - \bar{x})^2
B = N \cdot \text{Var}(\bar{x}_j )
The Gelman-Rubin Statistic
Term \((B-W)\) represents additional variance due to incomplete convergence
Define \(\hat{R}\) statistic:
When chains have converged, \(B \approx W\) and \(\hat{R} \approx 1\)
\hat{R} = \sqrt{1 + \frac{B-W}{nW}}
Advantages and Limitations
Provides objective measure across multiple chains
Does not require knowing the true target distribution
Requires running multiple chains, increasing computational cost
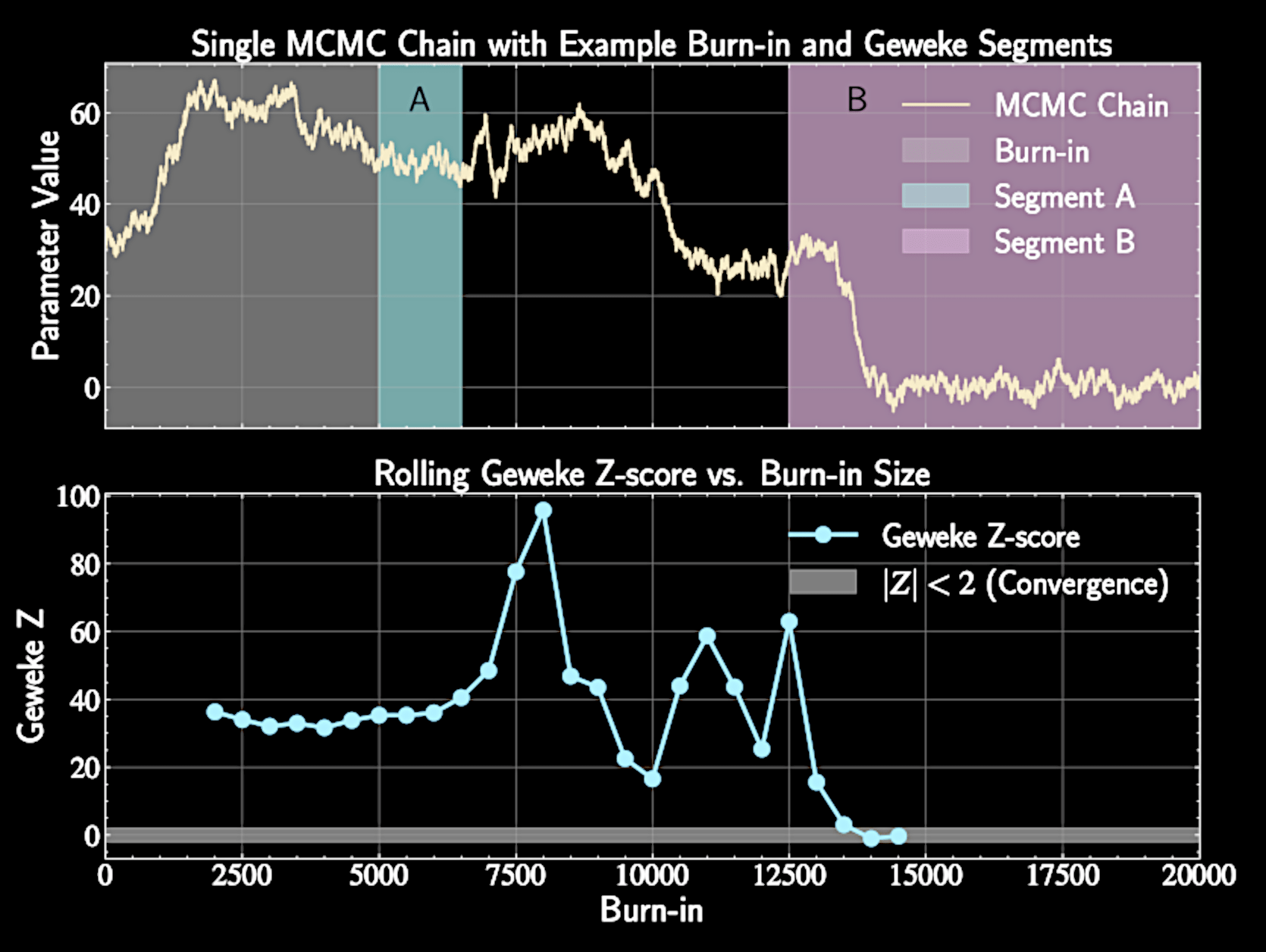
Geweke test
Run single chain and discard initial burn-in period
Assesses convergence using a single MCMC chain
Different segments of converged chain should have similar properties
Compare th first segment mean \(\bar{x}_A\) (first 10% of post-burn-in chain) with the last segment mean \(\bar{x}_B\) (typically last 50%)
Geweke test
Cannot sum infinite autocorrelation terms in practice
Samples in MCMC chain are not independent, variance of sample mean
Using windowed estimator:
\text{Var}(\bar{x}) = \frac{\sigma^2}{n}\left(1 + 2\sum_{k=1}^{\infty}R(k)\right) \equiv S
\hat{S}\equiv \frac{\hat{\sigma}^2}{N} \left(1 + 2\sum_{k=1}^{l} w(k, l) \hat{R}(k)\right), \quad w(k, l) = 1 - \frac{k}{l}
The Geweke Z-Score
Normalizes mean difference by standard error (adjusted for autocorrelation).
Compute Z-score:
Follows standard normal distribution
Z = \frac{\bar{x}_A - \bar{x}_B}{\sqrt{\hat{S}_A + \hat{S}_B}}
\( |Z| < 2 \) suggests convergence; \( |Z| > 2 \) indicates potential issues
From Metropolis to Metropolis-Hastings
Metropolis-Hastings generalizes Metropolis by allowing asymmetric proposals
Standard Metropolis algorithm uses symmetric proposal distributions
Can adapt to local geometry of the posterior distribution
Leverages prior knowledge about preferred directions of movement
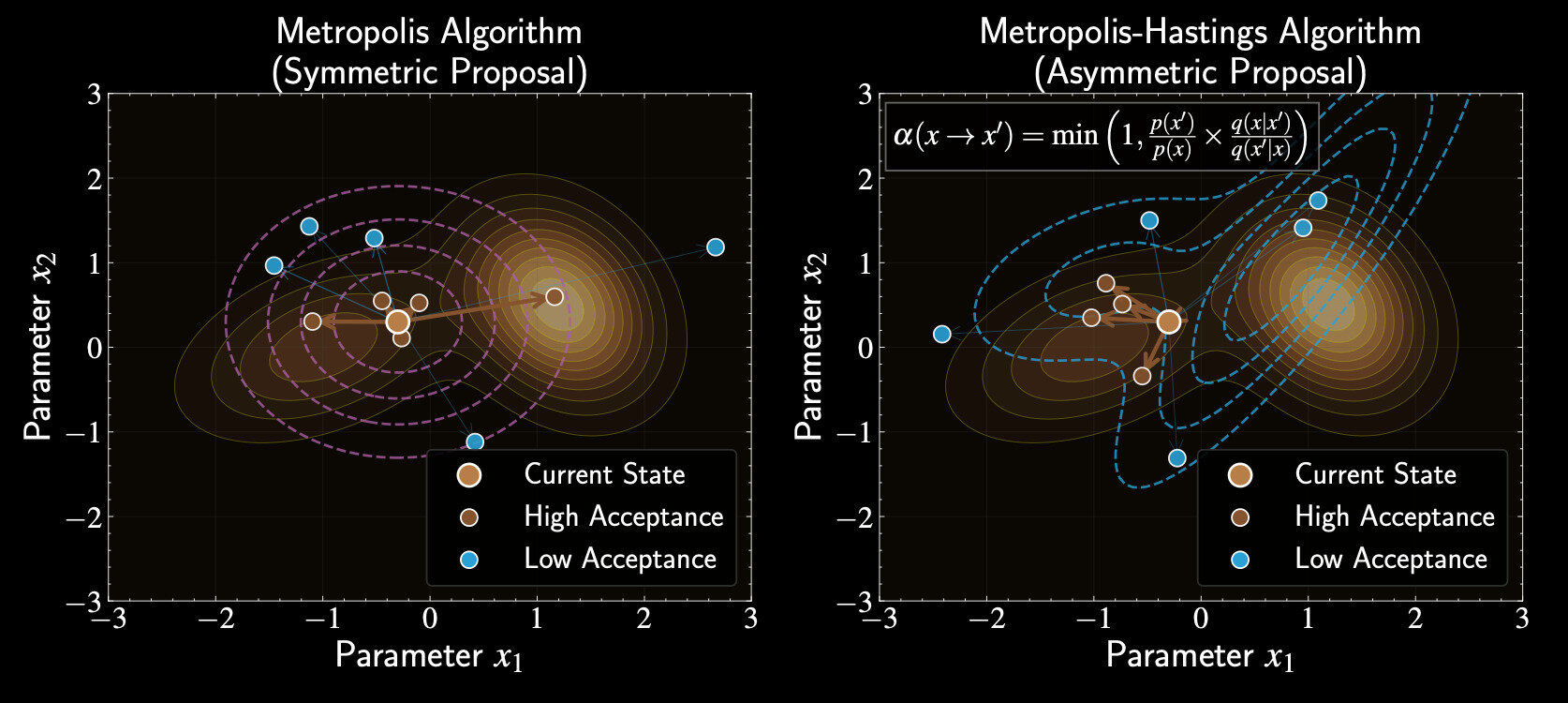
Transition Probability
Metropolis-Hastings acceptance probability:
Proposal distribution \(q(\mathbf{x}'|\mathbf{x})\) can be asymmetric: \(q(\mathbf{x}'|\mathbf{x}) \neq q(\mathbf{x}|\mathbf{x}')\)
Ensures detailed balance despite non-symmetric proposals, proof follows similar structure to Metropolis algorithm
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}'|\mathcal{D})q(\mathbf{x}|\mathbf{x}')}{p(\mathbf{x}|\mathcal{D})q(\mathbf{x}'|\mathbf{x})}\right)
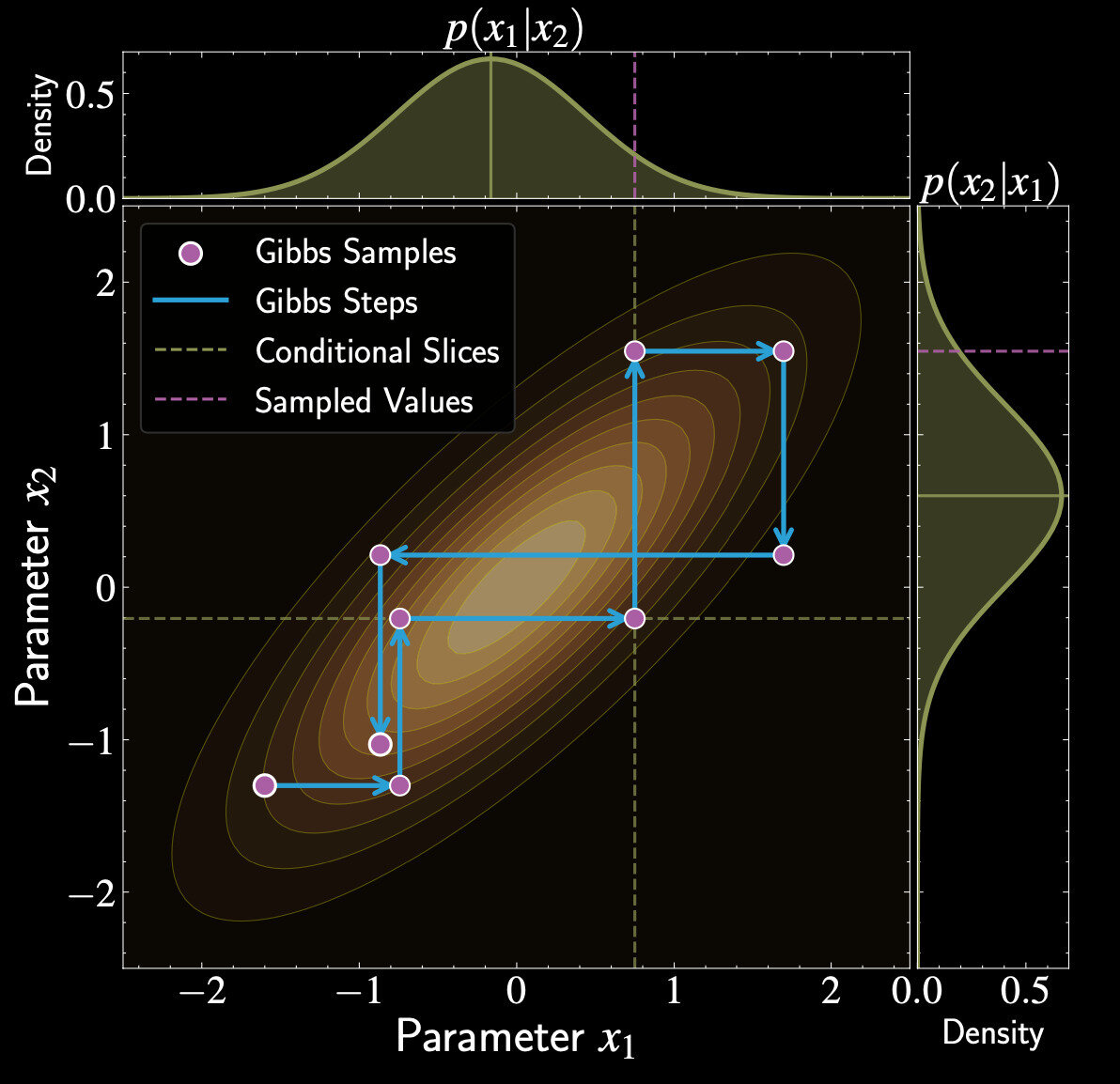
Introduction to Gibbs Sampling
Particularly effective when joint posterior is complex but conditionals are tractable
Updates one parameter (or block of parameters) at a time
"Divide and conquer" approach to high-dimensional sampling
Efficient when conditional distributions have standard forms. Can use specialized samplers for each parameter's conditional
Gibbs Sampling Procedure
Sample \(x_1^{(t+1)} \sim p(x_1 | x_2^{(t)}, \ldots, x_d^{(t)})\)
Start with initial state \(\mathbf{x}^{(t)} = (x_1^{(t)}, x_2^{(t)}, \ldots, x_d^{(t)})\)
Sample \(x_2^{(t+1)} \sim p(x_2 | x_1^{(t+1)}, x_3^{(t)}, \ldots, x_d^{(t)})\)
Continue through all parameters, using updated values immediately
Gibbs as Special Case of Metropolis-Hastings
Uses conditional distribution of target as proposal
Proposal distribution for parameter:
Since Metropolis-Hastings algorithm fulfills detailed balance, so does Gibbs sampling
q_i(\mathbf{x}' | \mathbf{x}) = p(x_i' | x_1, \ldots, x_{i-1}, x_{i+1}, \ldots, x_d) \cdot \prod_{j \neq i} \delta(x_j' - x_j)
Derivation of Acceptance Probability
For Gibbs proposal:
Metropolis-Hastings acceptance:
Apply product rule, and the fact that \( x_k = x'_k \) for all \( j \neq i \)
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}')q(\mathbf{x}|\mathbf{x}')}{p(\mathbf{x})q(\mathbf{x}'|\mathbf{x})}\right)
A(\mathbf{x}, \mathbf{x}') = \min\left(1, \frac{p(\mathbf{x}') \cdot p(x_i | x_1', \ldots, x_{i-1}', x_{i+1}', \ldots, x_d')}{p(\mathbf{x}) \cdot p(x_i' | x_1, \ldots, x_{i-1}, x_{i+1}, \ldots, x_d)}\right)
p(\mathbf{x}) = p(x_i | x_1, \ldots, x_{i-1}, x_{i+1}, \ldots, x_d) \cdot p(x_1, \ldots, x_{i-1}, x_{i+1}, \ldots, x_d )
Derivation of Acceptance Probability
Always accepts proposed values (acceptance rate = 100%)
Acceptance probability simplifies to:
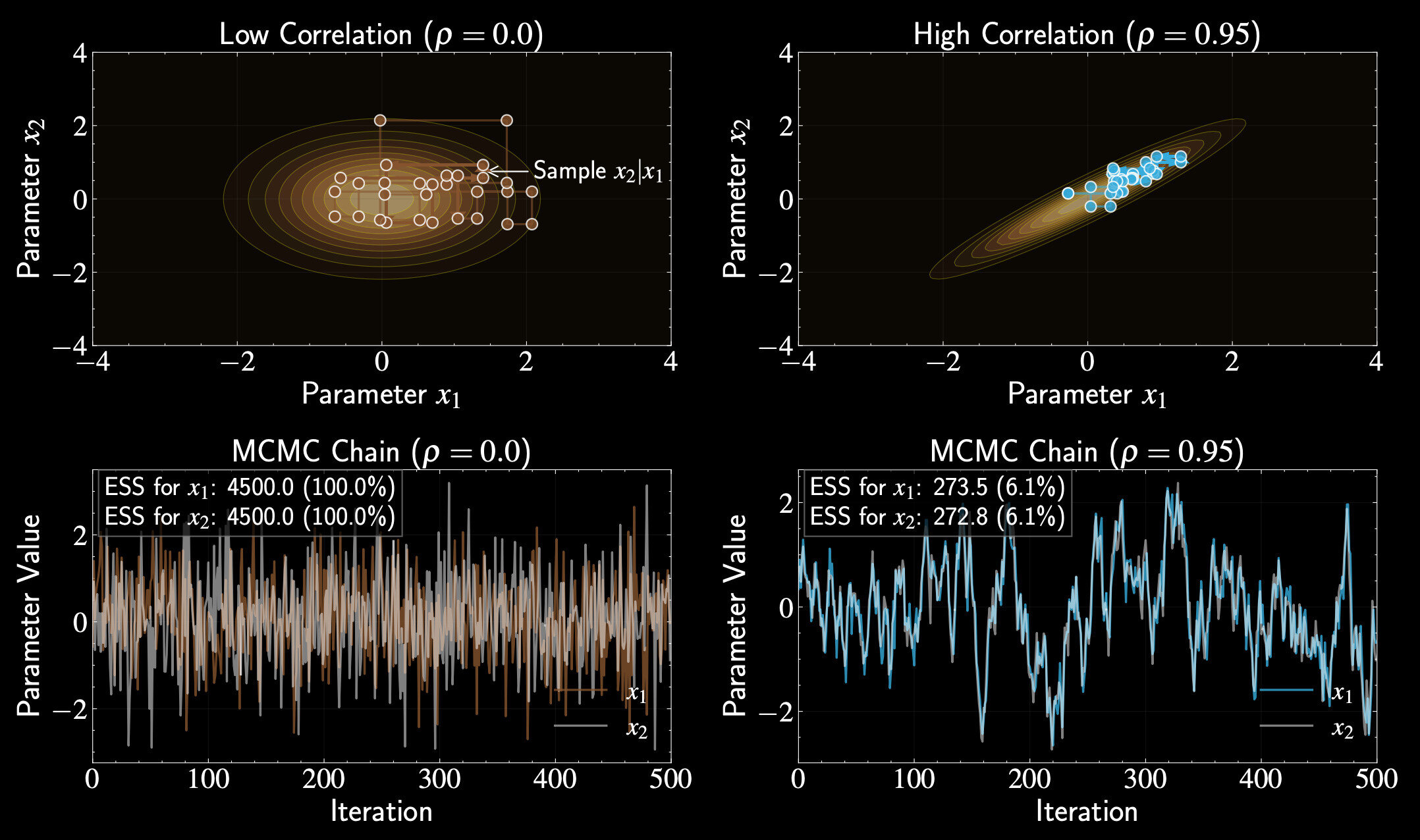
But acceptance probabiliy = 100% does not necessary mean effective sample size is large
A(\mathbf{x}, \mathbf{x}') = \min(1, 1) = 1
Critically depending on the correlation of the variables
Bivariate Gaussian Example
Need conditional distributions \(p(x_1 | x_2)\) and \(p(x_2 | x_1)\)
Target:
For bivariate Gaussian, conditionals are also Gaussian
\begin{pmatrix} x_1 \\ x_2 \end{pmatrix} \sim \mathcal{N}\left(\mathbf{0}, \begin{bmatrix} 1 & \rho \\ \rho & 1 \end{bmatrix}\right)
Using standard formula:
p(x_1 | x_2) = \mathcal{N}(\rho x_2, 1-\rho^2), \quad p(x_2 | x_1) = \mathcal{N}(\rho x_1, 1-\rho^2)
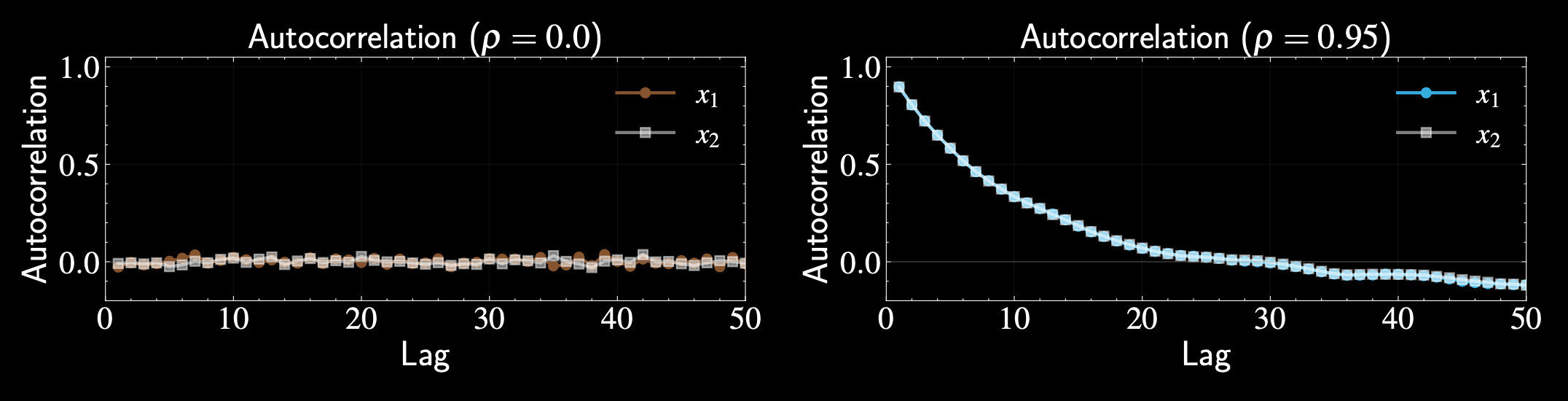
Effect of Correlation
Independent sampling in each dimension
No correlation \((\rho = 0)\):
High correlation \((\rho = 0.99)\)
p(x_1 | x_2) = p(x_2 | x_1)= \mathcal{N}(0, 1)
p(x_1 | x_2) \approx \mathcal{N}(0.99 x_2, 0.02)
p(x_1 | x_2) = \mathcal{N}(\rho x_2, 1-\rho^2)
Very small variance, new value close to previous value of other variable
Block Gibbs Sampling
Partition parameter vector into \(B\) blocks: \((\mathbf{x}_{(1)}, \mathbf{x}_{(2)}, \ldots, \mathbf{x}_{(B)})\)
Update groups of correlated parameters simultaneously
Sample \(\mathbf{x}_{(B)}^{(t+1)} \sim p(\mathbf{x}_{(B)} | \mathbf{x}_{(1)}^{(t+1)}, \ldots, \mathbf{x}_{(B-1)}^{(t+1)})\)
Groups correlated parameters to sample more efficiently
Hybrid Strategies
Use Gibbs steps for parameters with tractable conditionals
Combine Gibbs with other MCMC methods
Use Metropolis-Hastings steps for parameters with complex conditionals
Particularly well-suited for hierarchical Bayesian models
What We Have Learned :
Detailed Balance
Ergodicity
Convergence Test, Autocorrelation and Effective Sample Size
Metropolis-Hasting Algorithms and Gibbs Sampling
Astron 5550 - Lecture 13
By Yuan-Sen Ting



